THK DD Stage Type DKR
電動アクチュエータ 位置決めステージ テーエチケー
THK DDステージDKR形
THK㈱
THK
ロ
ボ
ッ
ト
・
F
A
機
器
e-87
ダイレクトドライブXYメカニズム
DDステージDKR形
¡
ダイレクトドライブ機構
トップテーブルをボールねじで直接駆動し高加減速・高
減衰・高精度を同時に実現
1000mm/secの最高速度、2Gの最高加減速瞬時減衰
±0.002mmの繰り返し位置決め精度
0.02/500mmの位置決め精度
¡
トーション同期機構
¡
四辺耐重支持構造
トップテーブルにかかる負荷を4辺枠で支え、耐久性、
耐荷重性を大幅にup
¡
KRガイドビーム構造
KRガイドを用いたビーム構造で薄形軽量、高剛性を確保
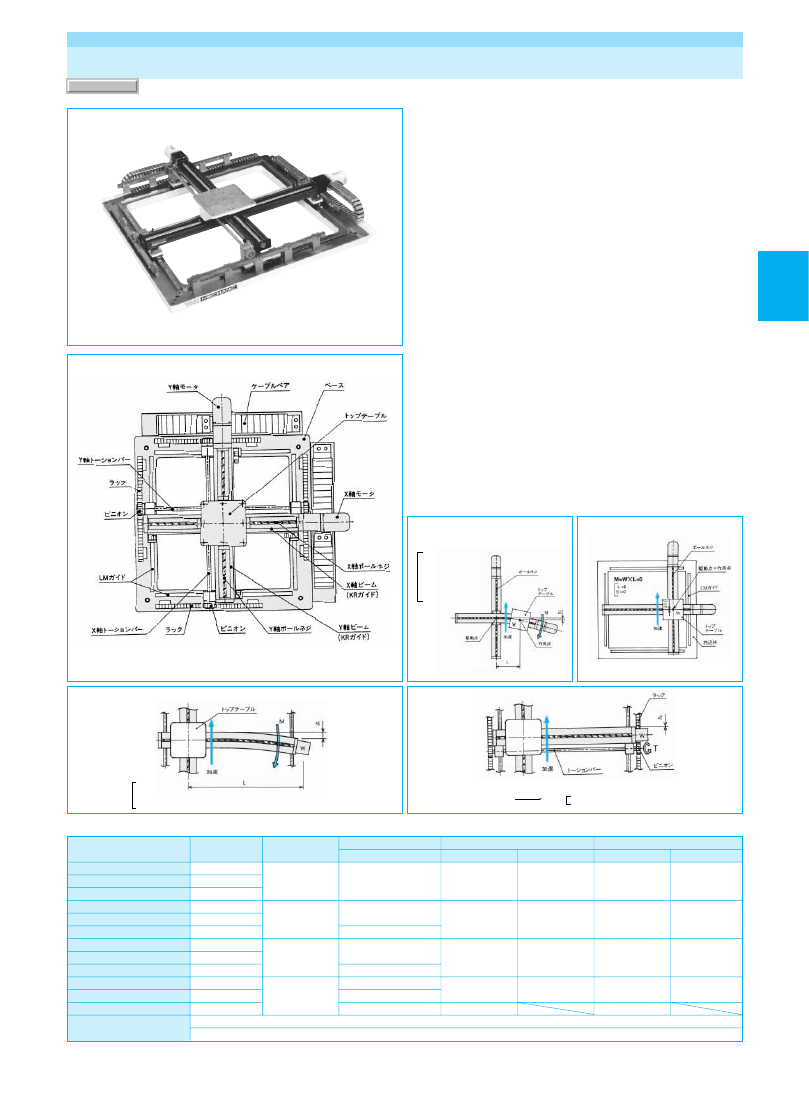
1.ダイレクトドライブメカニズム
従来のXYテーブルでは図1のようにボールねじの位置
と、トップテーブルの位置との間に距離「L」が存在し
加減速時には、曲げモーメント「M」が生じ、たわみ
「S
1
」が発生します。これに対しDKR形は図2のように
ビームの周囲に4辺枠を配置することによって、トップ
テーブルをボールねじで直接駆動しています。この機構
により、駆動点と作用点は一致し、2点間の距離「L」
は0となる為、曲げモーメント「M」が0となりたわみ
「S
1
」も0となります。
M =曲げモーメント
W =負荷慣性力
L =トップテーブルと
負荷間の距離
S
1
=曲げモーメント
によるたわみ
M=W×L
図1 従来のXYテーブル
図2 DKR形XYステージ
DKR形の基本構造
トーション同期無し
トーション同期有り
■DKR形の基本仕様
DKR型番
ストローク
(mm)
最大搭載質量
(kg)
最高速度(mm/s)
33□−0202
33□−0303
33□−0404
46□−0404
46□−0505
46□−0606
55□−0606
55□−0707
55□−0808
65□−0808
65□−0909
65□−1010
200× 200
300× 300
400× 400
400× 400
500× 500
600× 600
600× 600
700× 700
800× 800
800× 800
900× 900
1000×1000
10
20
25
30
500
1000
800
H=800 P=1000
750
H=800 P=1000
800
500
繰返し位置決め精度(mm)
H級
P級
位置決め精度(mm/500mm)
H級
P級
±0.005
±0.005
±0.005
±0.008
±0.008
±0.002
±0.002
±0.003
±0.003
0.08
0.10
0.10
0.10
0.10
0.02
0.02
0.02
0.02
付 属
1.各軸フォトセンサ
(原点1,オーバートラベル2個)
2.ケーブルベア
M =曲げモーメント
W =負荷慣性力
L =駆動点,作用点間の距離
S
1
=曲げモーメントによるたわみ
M=W×L
トーション効果
M
(S
1
)
T
(S
2
)
T =ねじりモーメント
S
2
=ねじりモーメントによるたわみ
メニュー表示