ア
プ
リ
ケ
ー
シ
ョン
AP
PL
IC
AT
IO
N
小型
単
軸
ロ
ボ
ット
TR
A
NSE
RV
O
単
軸
ロ
ボ
ット
FL
IP-
X
リ
ニア
単
軸
ロボ
ッ
ト
PH
A
SE
R
直
交
ロ
ボ
ット
X
Y-
X
ス
カ
ラ
ロ
ボ
ット
Y
K
-XG
ピッ
ク
&
プ
レ
イ
ス
Y
P-
X
ク
リ
ーン
C
LE
A
N
コ
ント
ロ
ー
ラ
CO
N
TR
OL
LER
各種
情
報
INF
OR
M
AT
IO
N
511
ア
プ
リ
ケ
ー
シ
ョン
AP
PL
IC
AT
IO
N
小型
単
軸
ロ
ボ
ット
TR
A
NSE
RV
O
単
軸
ロ
ボ
ット
FL
IP-
X
リ
ニア
単
軸
ロボ
ッ
ト
PH
A
SE
R
直
交
ロ
ボ
ット
X
Y-
X
ス
カ
ラ
ロ
ボ
ット
Y
K
-XG
ピッ
ク
&
プ
レ
イ
ス
Y
P-
X
ク
リ
ーン
C
LE
A
N
コ
ント
ロ
ー
ラ
CO
N
TR
OL
LER
各種
情
報
INF
OR
M
AT
IO
N
ケ
ー
ブ
ル
一
覧
CA
BLE
技
術
資料
TE
C
HN
IC
A
L
その
他
情
報
INF
OR
M
AT
IO
N
販
売
終
了
モ
デル
DIS
CO
NTI
NU
ED
一般にツールやワークは単純な形状でない場合が多く、その慣性モーメントの計算は簡単ではありません。
ここでは、負荷を慣性モーメントの計算ができる単純な形に近似していくつかの要素に置き換え、それらの慣性モーメントの合計を求めます。
以下に慣性モーメントの計算でよく用いる物体とその計算式を示します。
なお、J (kgfcmsec
2
) =I (kgm
2
) ×
10
.
2
の関係があります。
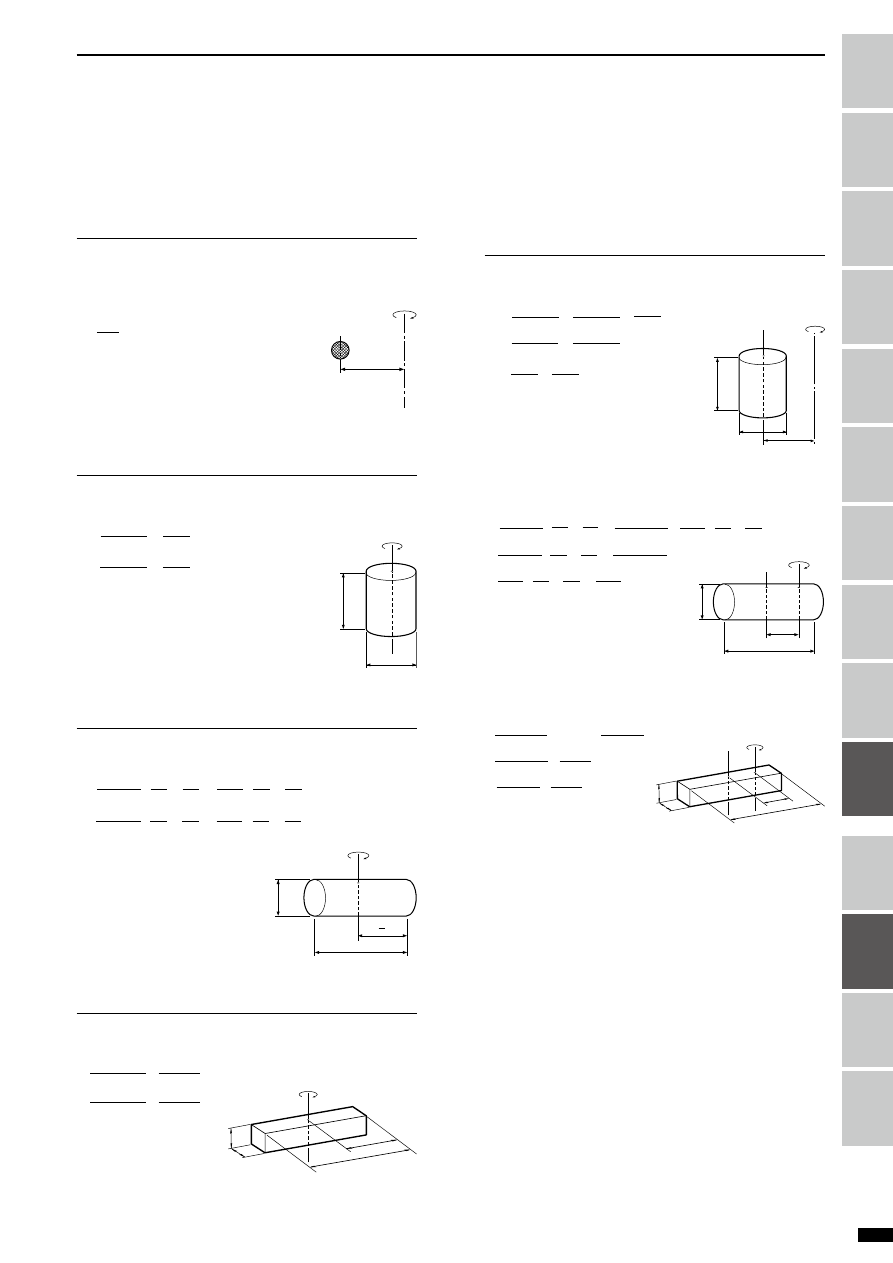
図①の様な回転中心を持つ質点の慣性モーメントは、次式とな
ります。これは、x が物体の大きさに対して十分大きいときに
近似値として使えます。
図⑤の様に円柱の中心が回転中心から x だけオフセットしてい
る場合の慣性モーメントは、次式となります。
同様にして図⑥の様な円柱の場合は
同様にして図⑦の様な角柱の場合は
図②の様な回転中心を持つ円柱の慣性モーメントは、次式とな
ります。
図③の様な回転中心を持つ円柱の慣性モーメントは、次式とな
ります。
図④の様な回転中心を持つ直方体の慣性モーメントは、次式と
なります。
■
慣性モーメントの求め方
【
1
】質点の慣性モーメント
【
5
】回転中心が物体の中心線から
オフセットしている場合
【
2
】円柱の慣性モーメント
その
1
【
3
】円柱の慣性モーメント
その
2
【
4
】直方体の慣性モーメント
図①
x
J=
Wx
2
g
(kgfcmsec
2
)
g:重力加速度 (cm/sec
2
)
m:質点の質量 (kg)
... (3.1)
I= mx
2
(kgm
2
)
W:質点の重量 (kgf)
図②
D
h
J=
ρπD
4
h
32g
WD
2
8g
=
(kgfcmsec
2
)
ρ:密度 (kg/m
3
, kg/cm
3
)
g:重力加速度 (cm/sec
2
)
m:円柱の質量 (kg)
... (3.2)
I=
ρπD
4
h
32
mD
2
8
=
(kgm
2
)
W:円柱の重量 (kgf)
図③
h
D
2
h
J=
ρπD
2
h
16g
W
4g
=
(kgfcmsec
2
)
ρ:密度 (kg/m
3
, kg/cm
3
)
g:重力加速度 (cm/sec
2
)
m:円柱の質量 (kg)
... (3.3)
D
2
4
h
2
3
(
+
)
D
2
4
h
2
3
(
+
)
I=
ρπD
2
h
16
m
4
=
(kgm
2
)
D
2
4
h
2
3
(
+
)
D
2
4
h
2
3
(
+
)
W:円柱の重量 (kgf)
図④
J=
ρabc(a
2
+b
2
)
12g
W(a
2
+b
2
)
12g
=
ρ:密度 (kg/m
3
, kg/cm
3
)
g:重力加速度 (cm/sec
2
)
m:直方体の質量 (kg)
... (3.4)
a
c
b
1/2a
I=
ρabc(a
2
+b
2
)
12
m(a
2
+b
2
)
12
=
(kgm
2
)
(kgfcmsec
2
)
W:直方体の重量 (kgf)
図⑤
D
h
J=
ρπD
4
h
32g
WD
2
8g
=
(kgfcmsec
2
)
... (3.5)
x
+
ρπD
2
hx
2
4g
+ Wx
2
g
中心線
回転中心
I=
ρπD
4
h
32
+
ρπD
2
hx
2
4
mD
2
8
=
mx
2
(kgm
2
)
ρ:密度 (kg/m
3
, kg/cm
3
)
g:重力加速度 (cm/sec
2
)
m:円柱の質量 (kg)
W:円柱の重量 (kgf)
+
図⑥
h
D
W
4g
=
(kgfcmsec
2
)
... (3.6)
D
2
4
h
2
3
(
+
)
x
中心線
J=
ρπD
2
h
16g
+
D
2
4
h
2
3
(
+
)
ρπD
2
hx
2
4g
+ Wx
2
g
I=
ρπD
2
h
16
+
D
2
4
h
2
3
(
+
)
ρπD
2
hx
2
4
m
4
=
D
2
4
h
2
3
(
+
)
+ mx
2
(kgm
2
)
図⑦
J=
ρabc(a
2
+b
2
)
12g
W(a
2
+b
2
)
12g
=
m:角柱の質量 (kg)
... (3.7)
a
c
b
x
中心線
+
ρabcx
2
g
Wx
2
g
+
(kgfcmsec
2
)
I=
ρabc(a
2
+b
2
)
12
+ ρabcx
2
m(a
2
+b
2
)
12
=
+ mx
2
(kgm
2
)
W:角柱の重量 (kgf)
R
軸許容慣性モーメントと加速度係数