F6
F7
ア
ン
プ
モ
ー
タ
オプション
インフォメーション
1. 機構部の決定をします。
また、それぞれの機構部品(ボールネジの長さ、
リードやプーリ径など)の詳細を決めます。
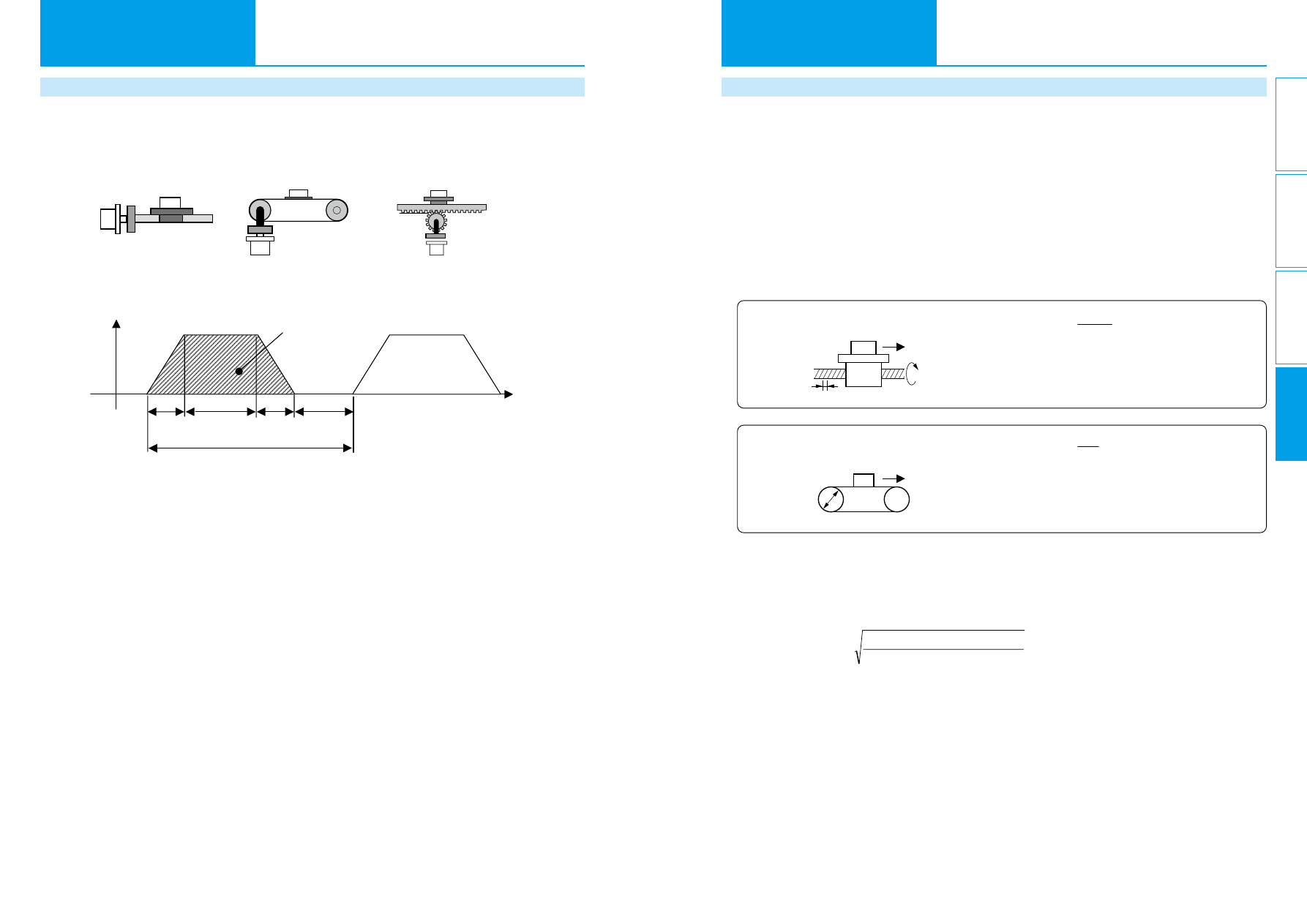
<機構部の代表例>
ボールネジ機構 ベルト機構 ラック&ピニオンなど
2. 運転パターンの決定をします。
加減速時間、一定速時間、停止時間、サイクル時間、移動距離
注.
運転パターンは、モータの容量選定を大きく左右します。
特に必要な場合を除いては、加減速時間、停止時間はできるだけ大きく取った方が
小さな容量で済む場合があります。
3. 負荷慣性モーメント
(イナーシャ)、慣性モーメント
(イナーシャ)比の計算をします。
各機構部に合わせて、負荷慣性モーメント
(イナーシャ)
を計算します。
(一般的な慣性モーメント
(イナーシャ)
とその計算方法を参照ください)
また、その負荷慣性モーメント
(イナーシャ)
を選定モータの慣性モーメント
(イナーシャ)
で割り、
イナーシャ比を
計算します。
この時、慣性モーメント
(イナーシャ)のカタログ値の単位は、
“×10
−4
kg・m
2
”である事に注意してください。
4. 回転速度の計算
移動距離、加減速時間、一定速時間によりモータ回転速度を計算します。
5. トルクの計算
負荷慣性モーメント
(イナーシャ)
と加減速時間、一定速時間により必要なモータトルクを計算します。
6. モータの選定
以上の3∼5項を満たすモータを選定します。
時 間
速 度
移動距離
(斜線部で移動した距離)
停止時間
一定速時間
減速時間
サイクル時間
加速時間
1. トルク
(1)ピークトルク
動作中(主に加減速時)に、モータに必要とされる最大のトルクです。
モータの最大トルクの80%以下が目安となります。トルクがマイナスに
なる場合は回生抵抗が必要となる場合があります。
(2)走行トルク、停止時保持トルク
モータに長時間、必要とされるトルクです。
モータの定格トルクの80%以下が目安となります。トルクがマイナスに
なる場合は回生抵抗が必要となる場合があります。
各機構の走行トルク計算式
ボールネジ機構
ベルト機構
(3)実効トルク
動作・停止のすべてに必要なトルクを二乗平均して単位時間当たりにしたものです。
モータの定格トルクの80%以下が目安となります。
2.回転速度
最大回転速度
運転時のモータの最大回転速度:定格回転速度以下が目安です。
モータの最大回転速度まで使用する際は、トルクと温度上昇に注意が必要です。
実際の計算は、選定例を参照ください。
T
f
=
2 πη
P
(μgW+F)
走行トルク
W:質量 [kg]
η:機械部効率
P:リード [m]
μ:摩擦係数
F:外力 [N]
g:重力加速度9.8 [m/s
2
]
走行トルク
W:質量 [kg]
η:機械部効率
D:プーリ径 [m]
μ:摩擦係数
F:外力 [N]
g:重力加速度9.8 [m/s
2
]
T
a
:加速時トルク [N・m]
t
a
:加速時間 [s]
t
c
:サイクル時間 [s]
T
f
:走行トルク [N・m]
t
b
:一定速時間 [s]
(運転時間+停止時間)
T
d
:減速時トルク [N・m]
t
d
:減速時間 [s]
T
f
=
2
η
D
(μgW+F)
T rms=
t
c
T
a
2
×t
a
+T
f
2
×t
b
+T
d
2
×t
d
W
D
F
P
W
F
モータの容量選定
モータの容量選定
モータ選定の流れ
モータ選定の流れ
選定にかかわる項目の説明
選定にかかわる項目の説明