I-60
オリエンタルモーター総合カタログ
2011/2012
ステッピングモーター
ステッピングモーターの基本特性
■
ステッピングモーターを使用するときには、モーターの特性が使
用条件に適しているかどうかが重要なポイントになります。
ここではステッピングモーターを使用する上で重要となる特性を
説明します。
ステッピングモーターの特性は大きく分けて 2 つに分類されます。
動特性:
●
ステッピングモーターの起動または回転に関する特性で、主に
機器の動作やサイクルタイムに関係があります。
静特性:
●
ステッピングモーターが停止しているときの角度変化に関する
特性で、機器の精度に関係があります。
①T
H
②
③
回転速度
トルク
fs
回転速度―トルク特性
動特性
●
回転速度―トルク特性
◇
ステッピングモーターを駆動したときの回転速度とトルクの関係
を表した特性図です。
ステッピングモーターの選定時に必ず使用する特性です。 横軸は
モーター出力軸の回転速度を、縦軸はトルクを表しています。
回転速度―トルク特性はモーターとドライバによって決まり、使
用ドライバの種類によって大きく異なります。
①励磁最大静止トルク(T
H
:Holding Torque)
ステッピングモーターが通電状態(定格電流)で停止していると
きに持っている最大の保持トルク(保持力)のことです。
②プルアウトトルク(Pullout Torque)
各回転速度で出すことのできる最大トルクです。
モーターを選定する場合は必要トルクがこの曲線の内側に入っ
ていなければなりません。
③最大自起動周波数(f
S
)
ステッピングモーターが摩擦負荷、慣性負荷が 0 のとき、瞬時(加
減速時間なし)に起動、停止できる最大のパルス速度です。
これ以上のパルス速度でモーターを駆動する場合には、徐々に
加減速する必要があります。 慣性負荷がモーターに付くことに
よってこの周波数は低下します。
(慣性負荷―自起動周波数特性 参照)
最大応答周波数(f
r
)
ステッピングモーターが摩擦負荷、慣性負荷が 0 のとき、徐々
に加減速することにより運転することのできる最大のパルス速
度のことです。
下図は代表的な 5 相ステッピングモーターユニットの回転速度
―トルク特性です。
1000
2000
3000
4000
0
0
1.2
1.0
0.8
0.6
0.4
0.2
fs
0
10
20
30
0
4
8
設定電流:1.4A/相
外部負荷慣性:J
L
=0kg・m
2
ステップ角:0.72˚/step
AC100V
入力
AC200V
入力
プルアウトトルク
ドライバ入力電流
パルス速度 [kHz]
回転速度 [r/min]
トルク
[N
・m]
(分割数1)
電流
[A]
◇ 慣性負荷―自起動周波数特性
自起動周波数の慣性負荷による変化を表した特性です。
ステッピングモーターのローター自身や負荷には、慣性モーメン
トがあるため、瞬時起動時、停止時に遅れや進みがモーター軸に
生じます。 この値はパルス速度によって変わってきますが、ある
値を超えるとモーターはパルス速度に追従できなくなり、脱調(ミ
スステップ)してしまいます。
この脱調する寸前のパルス速度を自起動周波数といいます。
2500
2000
1500
1000
500
0
1000 2000 3000 4000 5000
0
最大自起動周波数
f
[
Hz
]
慣性負荷 J
L
(×10
−7
[kg・m
2
])
慣性負荷―自起動周波数特性
慣性負荷に対する最大自起動周波数の変化は、次式で近似するこ
とができます。
=
f
f
S
J
L
J
O
[Hz]
1
+
f
S
:モーター単体の最大自起動周波数[Hz]
f
:慣性負荷がある場合の最大自起動周波数[Hz]
J
O
:ローターの慣性モーメント[kg·m
2
]
J
L
:負荷の慣性モーメント[kg·m
2
]
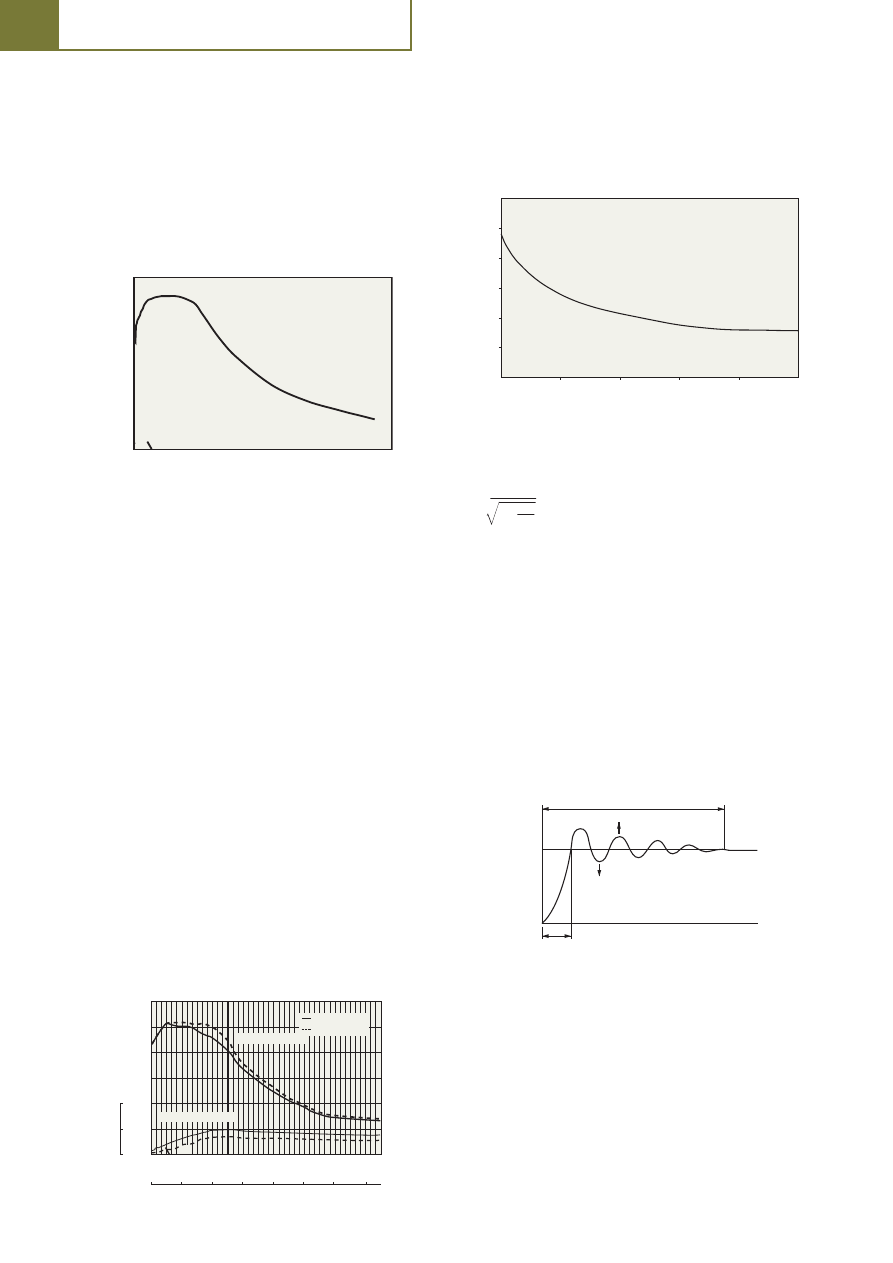
振動特性
◇
ステッピングモーターは連続的なステップ状の動きをしながら回
転しています。 そのステップ状の動きのひとつを見たものが下の
1
ステップ応答です。
① 停止状態のステッピングモーターに 1 パルスを入力すると、次
のステップ角に向かって加速します。
② 加速したモーターはステップ角度を通過し、ある角度をオーバ
ーシュートした後、逆方向に引き戻されます。
③ このように減衰振動した後、所定のステップ角度の位置で停止
します。
t
θ
s
①
②
③
θ
s
: ステップ角
t
: 立ち上がり時間
逆転方向
正転方向
セットリングタイム
角度
時間
1
ステップ応答