E7
技
術
資
料
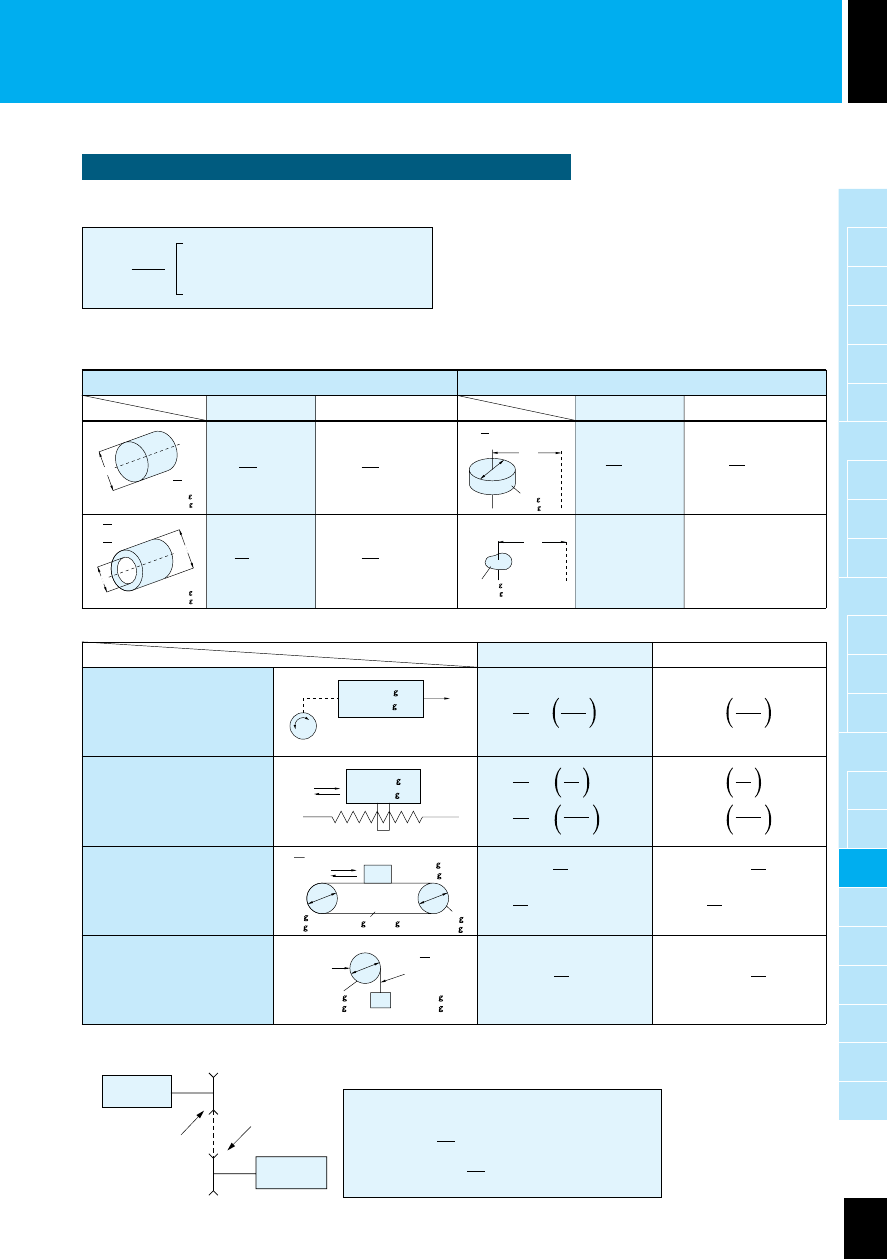
慣性モーメント J { GD
2
(フライホイール効果)}の算出法
■
回転体の慣性モーメント J {GD
2
}
■
直線運動をする場合の慣性モーメント J {GD
2
}
■
回転比がある場合の慣性モーメント J {GD
2
}の換算
J =
G : 重量(kgf)
D : 回転直径(m)
J : 慣性モーメント
(kg・m
2
)
回転中心が重心と一致している場合
S I 単位
重力単位
重力単位
S I 単位
重力単位
S I 単位
回転中心が重心と一致していない場合
{kgf・m
2
}
(kg・m
2
)
{kgf・m
2
}
(kg・m
2
)
{kgf・m
2
}
(kg・m
2
)
{kgf・m
2
}
(kg・m
2
)
(kg・m
2
)
(kg・m
2
)
(kg・m
2
)
(kg・m
2
)
(kg・m
2
)
(kg・m
2
)
(kg・m
2
)
(kg・m
2
)
一
般
の
場
合
水 平 直 線 運 動 の 場 合
(リードネジによって物体を動かす場合)
水 平 直 線 運 動 の 場 合
( コ ン ベ ア な ど )
垂 直 直 線 運 動 の 場 合
(クレーン・ウインチなど)
GD
2
=
WD
2
+4WR
2
1
2
V
π
・n
GD
2
=4WR
2
GD
2
=W・
(大きさが無視できる場合)
J = Mr
2
+MR
2
1
2
J = MR
2
(大きさが無視できる場合)
2
P
π
GD
2
=W・
2
V
π
・n
=W・
2
1
2
1
2
GD
2
=W
1
D
2
+
W
2
D
2
1
2
GD
2
=W
1
D
2
+
W
2
D
2
+
W
3
D
2
+W
4
D
2
負荷の慣性モーメント J
b
{GD }
をn
a
軸に換算すると
2
b
J= J
a
+(
) × J
b
n
b
n
a
J
a
{GD }
J
b
{GD }
n
a
(rpm)
n
b
(rpm)
V
π
・n
1
4
J=
M・
1
4 M・
1
4 M・
2
P
π
J=
2
V
π
・n
=
2
1
2
1
2
J=M
1
r
2
+
M
2
r
2
1
2
J=M
1
r
2
+
M
2
r
2
+
M
3
r
2
+M
4
r
2
1
2
GD
2
=
WD
2
1
2
GD
2
=
W(D
2
+d
2
)
1
2
J = Mr
2
1
2
J = M(r +r )
2
b
2
a
2
2
b
2
a
{GD
2
= GD +(
)×GD }
n
b
n
a
2
SI 単位系の慣性モーメント J (kg・m
2
)
と重力単位系のGD
2
(kgf・m
2
)の換算は下記のようになります。
GD
2
4
2
1
2
2
平行軸
性能表/
寸法図
ギアモータ
ブレーキ付
防
水
ギアモータ
ブレーキ付
ス ピ ード
コントロール
ギアモータ
クラッチ /
ブレーキ付
ギアモータ
G Tタイプ
ギアモータ
ブレーキ付
直交軸
性能表/
寸法図
ギアモータ
ブレーキ付
防
水
ギアモータ
ブレーキ付
ス ピ ード
コントロール
ギアモータ
ス ピ ード
コントロール
ギアモータ
同心中空軸
同心中実軸
性能表/
寸法図
ギアモータ
ブレーキ付
防
水
ギアモータ
ブレーキ付
平行軸
GTR-L
シリーズ
性能表/寸法図
ス ピ ード
コントロール
ギアモータ
ブレーキ付
ギアモータ
レバーシブル
ブレーキ付
技術資料
規格モータ
ご使用上
の注意
オプション
価格表
選定
サービス
カタログ
申込書
r = (m)
D
2
質量M(k )
{重量W(k f)}
質量M(k )
{重量W(k f)}
D(m)
R(m)
R(m)
質量M(k )
{重量W(k f)}
質量M(k )
{重量W(k f)}
r = (m)
D
2
r
1
= (m)
D
2
r
2
= (m)
d
2
D(m)
d(m)
D(m)
直線運動
n(rpm)
速度
V(m/min)
V(m/min)
リードネジ
P=リードネジ
のリード
(m/rev)
M
3
(k )
{W
2
(k f)}
M
2
(k )
M
2
(k )
質量M
1
(k )
M
4
(k )
ドラム
r = (m)
ロープ
{W
3
(k f)}
{W
4
(k f)}
{W
2
(k f)}
{重量W
1
(k f)}
質量M
1
(k )
{重量W
1
(k f)}
D
2
r = (m)
D
2
D(m)
D(m
)
D(m)
質量M(k )
{重量W(k f)}
質量M(k )
{重量W(k f)}