22
製
品
特
長
ラ
イ
ン
ア
ッ
プ
一
覧
機
能
紹
介
ロ
ボ
ッ
ト
本
体
仕
様
コ
ン
ト
ロ
ー
ラ
仕
様
シ
ス
テ
ム
構
成
オ
プ
シ
ョ
ン
仕
様
技
術
情
報
F
A関
連
製
品
サポート
・
ネッ
トワーク
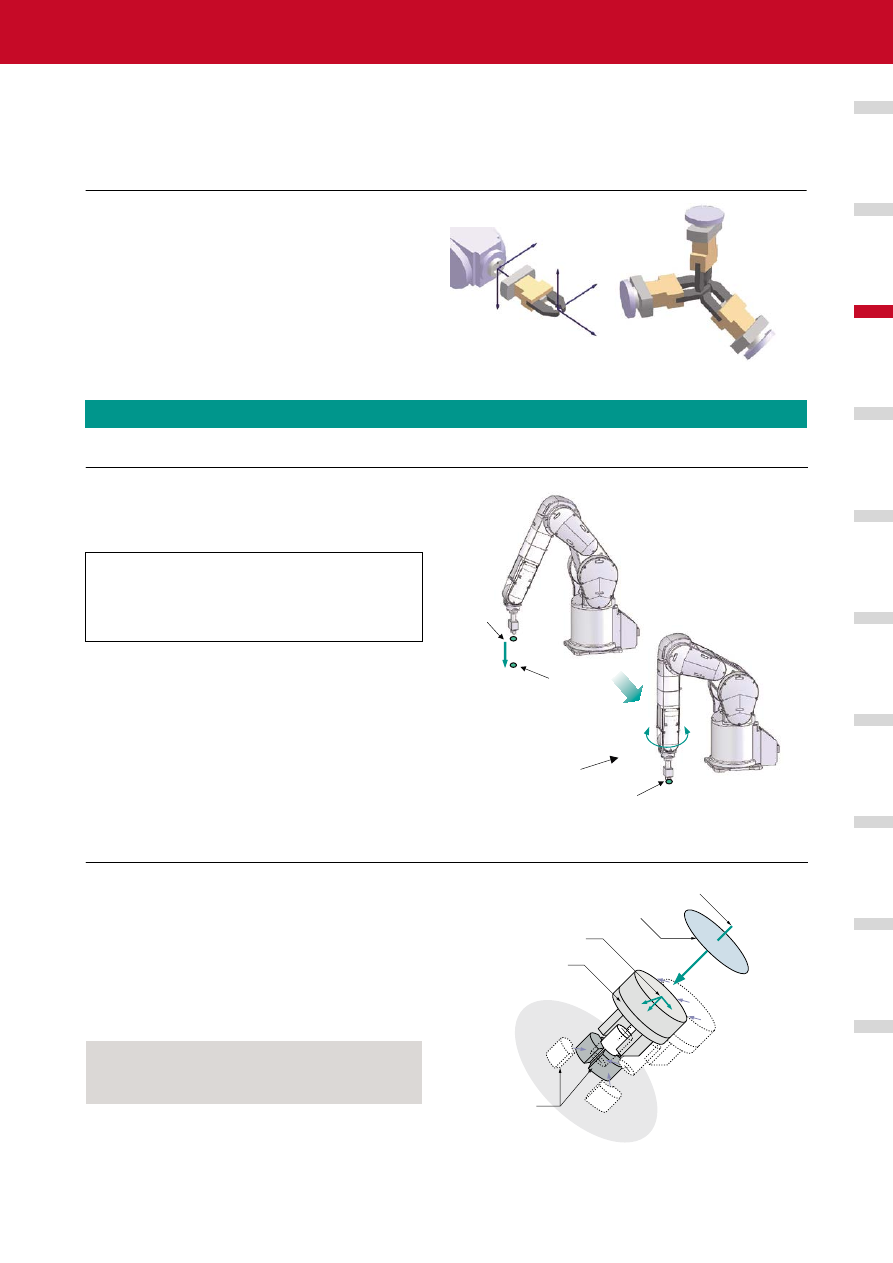
作業への適応
特異点通過機能
●従来、通過することができなかったロボットの特異点を通過することができ
ます。これにより、これまでより自由な周辺レイアウトが可能になります。
●特異点の存在による作業中断がなくなり、ティーチング作業を容易に行
うことができます。
簡単ツール長設定
ツール座標系のツール設定を、実際のツールを装着して同じポイントを3~8
点教示することによって設定できます。
図面からの数値計算が不要で、ツール製作時の誤差などを含めた実際の
ツール設定を行うことができます。
特異点とは:
直交座標系の位置データを使って直線補間動作を行うとき、
J5軸の角
度が0°のような場合、
J4軸とJ6軸のとりえる角度に無限の組み合わせ
が発生します。この点を特異点と呼び、通常ではロボットを所望の位置と
姿勢に動作させることができません。この位置を特異点といいます。
直交コンプライアンス制御
●ロボットの剛性を低くし、外力に追従する機能です。ロボット自身がコンプ
ライアンス機能を持ち、特殊なハンドやセンサを必要としません。
●チャッキングやワーク挿入時の干渉力を低減し、外力に倣った動作制御
が行えます。
・ロボットの座標系やツールの座標系など、コンプライアンス方向を任意に
設定することができます。
・ワークの干渉保護、チョコ停軽減に便利です。
●ツーリングコスト低減
●ライン停止低減
●立上げ時間の短縮
P2
P1
動作方向
P2
J4軸回転
始点の姿勢
目標位置の姿勢
3~8点教示して設定
挿入方向or通常制御方向
倣い平面
ツール座標系
ロボットハンド部
位置決め装置
+X
+Y
+Z
P1→P2への移動時に、特異
点(J5軸=0°
)または近傍を姿
勢一定で通過しようとすると、ロ
ボットのJ4軸が急速に回転し、
ロボットは通過することができま
せんでした。