21
負荷
基本性能アップによる使い勝手の向上
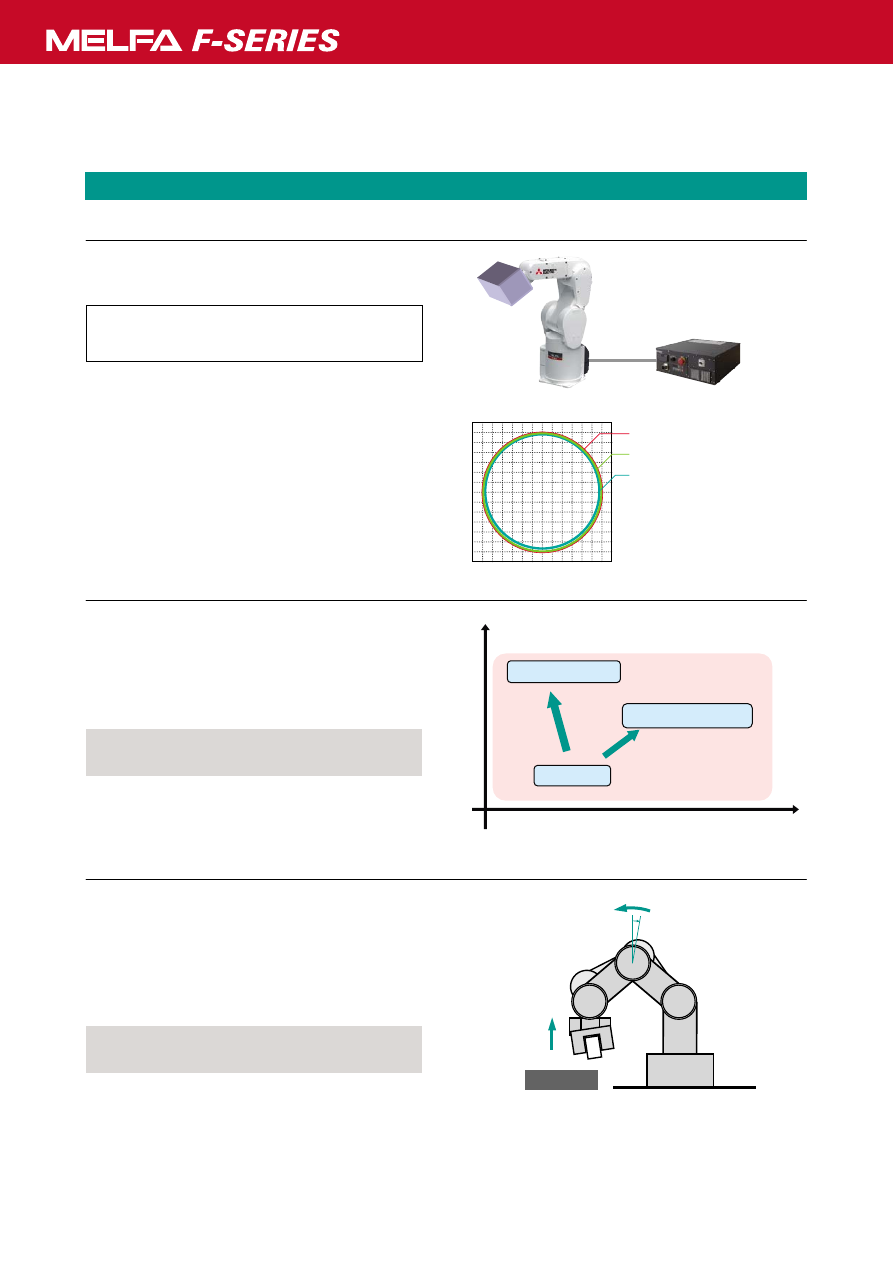
アクティブゲイン制御
精度向上
●ロボットの動作位置、姿勢、負荷条件により最適なモータ制御チューニン
グを自動設定します。
●目標軌跡に対する追従精度が向上します。
・アクティブゲイン制御とは、位置ゲインをリアルタイムで変更する制御方
式です。
・精度の要求される直進動作やシーリング作業などに効果があります。
動作モード設定機能
●お客様システムに合わせて軌跡優先/速度優先動作をプログラム中で
設定することができます。
●ロボットの動作位置、姿勢、負荷条件により最適なモータ制御チューニン
グを自動設定します。
●目標軌跡に対する追従精度が向上します。
・精度の要求される直進動作やシーリング作業などに効果があります。
●軌跡精度向上
●制振性能向上
たわみ補正機能
●重力によるロボットアームのたわみを補正します。
●動作位置、姿勢、負荷状況に応じて補正量を演算し、自動的にたわみ量
を補正します。
●重力による静的たわみ以外にも、動作中の慣性力による動的たわみも
補正します。
・ピッチの小さいカセットへのワーク搬送作業やパレタイズ作業に効果があ
ります。
●パレタイズ精度向上
●軌跡精度向上
高速
高精度
標準設定
高速位置決めモード
軌跡高精度モード
MvTune 1
MvTune 2
MvTune 3
目標軌跡
アクティブゲイン制御あり
アクティブゲイン制御なし
たわみ補正
k
θ
⊿θ補正
ロボットの姿勢、負荷条件を常時モニタ。
自動チューニング