20
製
品
特
長
ラ
イ
ン
ア
ッ
プ
一
覧
機
能
紹
介
ロ
ボ
ッ
ト
本
体
仕
様
コ
ン
ト
ロ
ー
ラ
仕
様
シ
ス
テ
ム
構
成
オ
プ
シ
ョ
ン
仕
様
技
術
情
報
F
A関
連
製
品
サポート
・
ネッ
トワーク
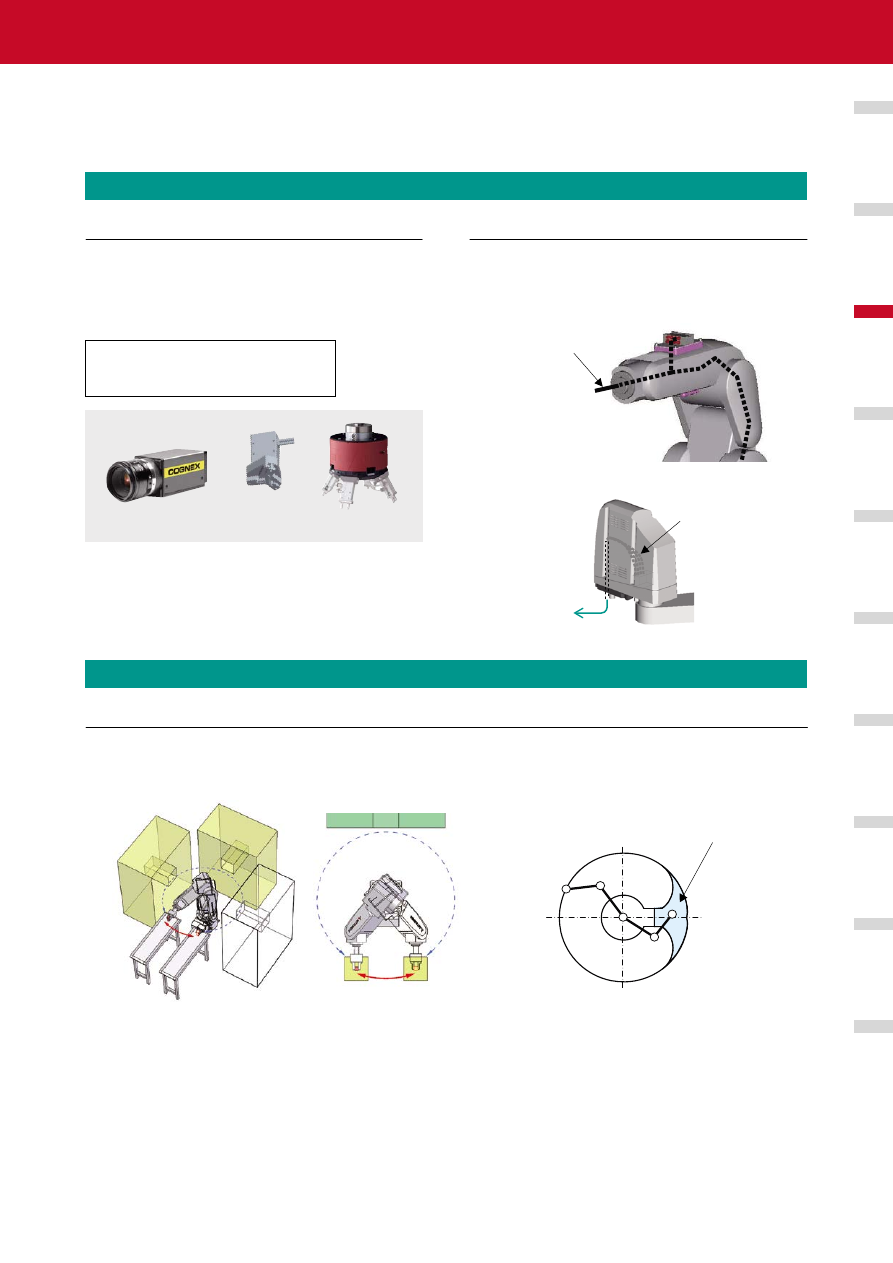
ツーリング性能向上
機内配線、配管の充実で多様なツールに対応
ビジョンセンサ、多機能ハンドなどさまざまな用途へ対応可能な機内配線、配
管を用意しています。
●ハンド入力8点、出力8点内装可能
●ビジョンセンサ用イーサネットケーブル内装可能
●多機能ハンド用ケーブル内装可能
ハンド配線、配管内装化
先端軸にハンド配管内装経路を準備し、ロボット手首のハンド取り付け部まで
配線・配管を内装可能としました。これにより、配線・配管が容易になり、配管
の絡みの問題が解消します。ケーブル周辺機器との干渉回避および断線リ
スクを低減します。
設置スペースのフル活用
旋回軸動作範囲の拡大
ロボット配置検討の自由度が向上します。
背面含めた全周アクセスでスペースを有効に活用できます。移動距離を短く
することで、タクトタイムを短縮できます。
多機能ハンド
ビジョンセンサ
接続可能
・エアハンド以外にも高機能ハンドなどの装着が容易
(他社製当社専用ハンドへ標準のまま接続可)
・手首部へのビジョンセンサ装着時、配線が容易
RV-2FQ/2FD旋回動作
装置1
装置2
装置3
取出
払出
取出
払出
J1軸可動ストッパ
J1軸動作範囲拡大により
後方部へのアクセスも可能
RH-FQ/FD背面アクセス
J6軸先端まで、アーム内に
配線・配管可能
注)機種により内装可能線種が異なる場合があります。
RV-2Fには内装仕様はありません。
ハンドへ
内装化