19
サイクルタイム短縮
基本性能アップによる生産性向上
コンパイル実行による処理速度アップ
ロボットプログラムを予めコンパイル(実行前にプログラム全体を実行しや
すいようにコード変換すること)
して中間言語で処理することにより従来比
1.2倍で実行可能です。一行の行数が長い場合は、最大3倍のタクト短縮
が図れます。
(従来比)
最適加減速制御/最適オーバーライド機能
●ロボットの動作位置、姿勢、負荷条件により最適な加減速時間、速度を
自動設定します。
●負荷条件を設定し、ワークの把持/非把持により自動的に加減速時間
や速度を変更します。
●作業にとって最大の動作速度を引き出します。
●サイクルタイム短縮に要する時間を軽減します。
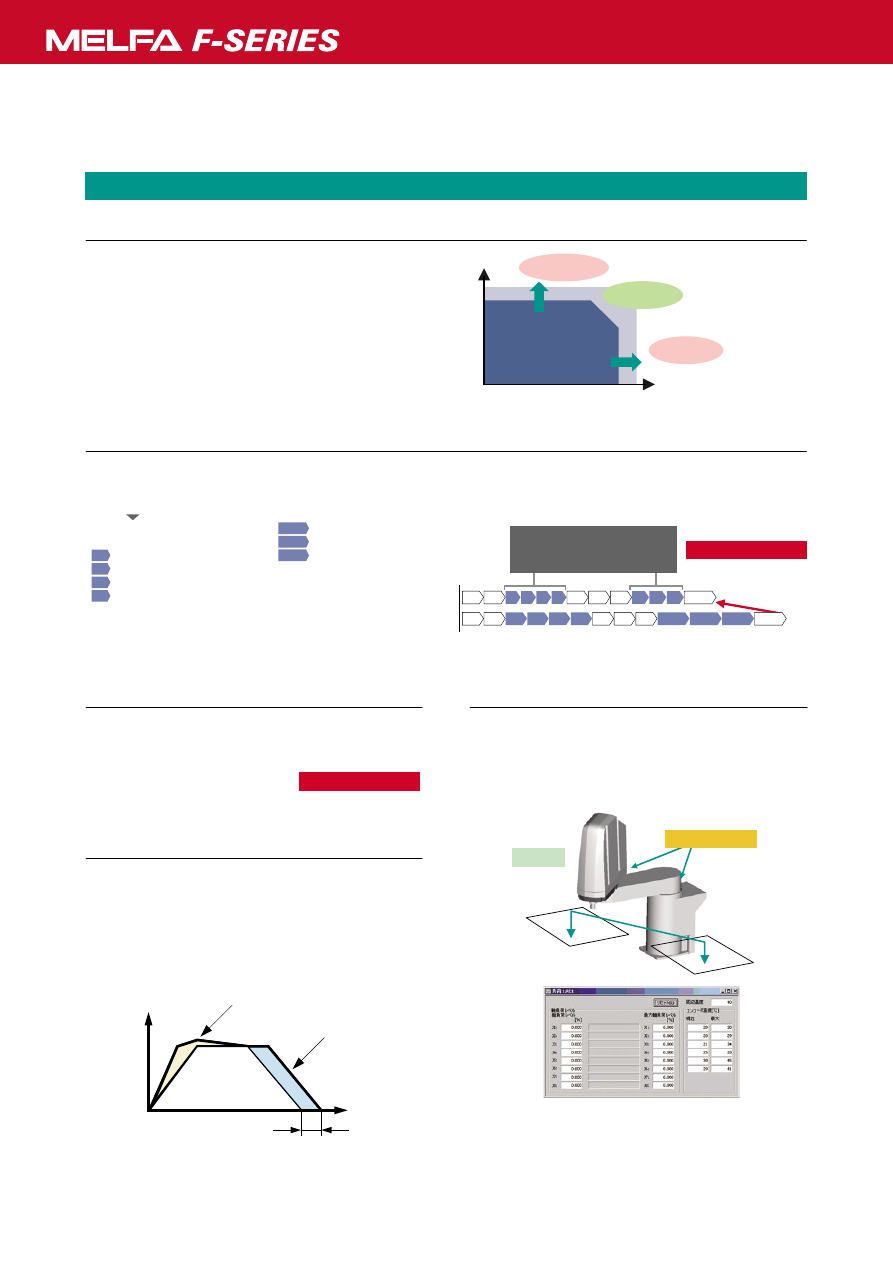
連続動作性の向上
ロボット周辺温度設定(パラメータで設定)に基づき、過負荷検出レベルを
最適化します。これにより、ロボット各軸の実環境に即した負荷レベル演算
により、連続動作性能を向上させます。また、エンコーダ温度を監視し、許容
温度を超える場合にエラー停止させます。
高精度な勘合動作、品質確保、信頼性向上
タクトタイム短縮
プログラム高速実行
高速実行モードにより、SQ/SDシリーズに比べ最大で1.2倍の実行が可能で
す。演算処理、条件分岐処理は、最大2倍の処理速度でタクトを短縮します。
自社開発の高性能モータの採用、独自の駆動制御技術により、
クラス最高
の速度を実現します。
●高回転で高トルク出力を可能とし、加減速時間を短縮します。
●位置決め時間を短縮し、装置のスループットを向上します。
●連続動作性能が向上します。
~トップクラスの性能、機能の充実~
回転数
トルク
従来のモータ
新型モータ
トルクアップ
速度アップ
約20%短縮
エンコーダ温度監視画面
処理速度20%UP
処理速度20%UP
10 JOVRD 100
20 MOV P100
30
M1=M_IN(10)
40
IF M1=1 THEN GOTO 1000
50
IF M1=2 THEN GOTO 2000
60
IF M1=3 THEN GOTO 3000
70 MOV P999
80 ERROR 9000
90 END
1000
PL=P1*POFF*PSHIFT
1010
PUP=PL
1020
PUP.Z=PUP.Z+MZ
1030 MOV PUP
・
・
・
RH-Fシリーズ
SQ/SDシリーズ
プログラム処理時間
10
20
30
40
50
60
70
80
90
1000
1010
1020
1030
10
20
30 40 50 60
1000 1010 1020
70
80
90
1030
演算処理、条件分岐処理などにかかる
時間が大幅に短縮できます。
(動作条件により短縮率は変わります。)
サンプルプログラム
最適加減速制御/最適オーバーライド制御
通常制御
時間
速度
エンコーダ温度モニタ
周囲温度
注)
プログラムの命令や処理内容により
短縮効果は異なります。
注)
プログラムの命令や処理内容により
短縮効果は異なります。