18
製
品
特
長
ラ
イ
ン
ア
ッ
プ
一
覧
機
能
紹
介
ロ
ボ
ッ
ト
本
体
仕
様
コ
ン
ト
ロ
ー
ラ
仕
様
シ
ス
テ
ム
構
成
オ
プ
シ
ョ
ン
仕
様
技
術
情
報
F
A関
連
製
品
サポート
・
ネッ
トワーク
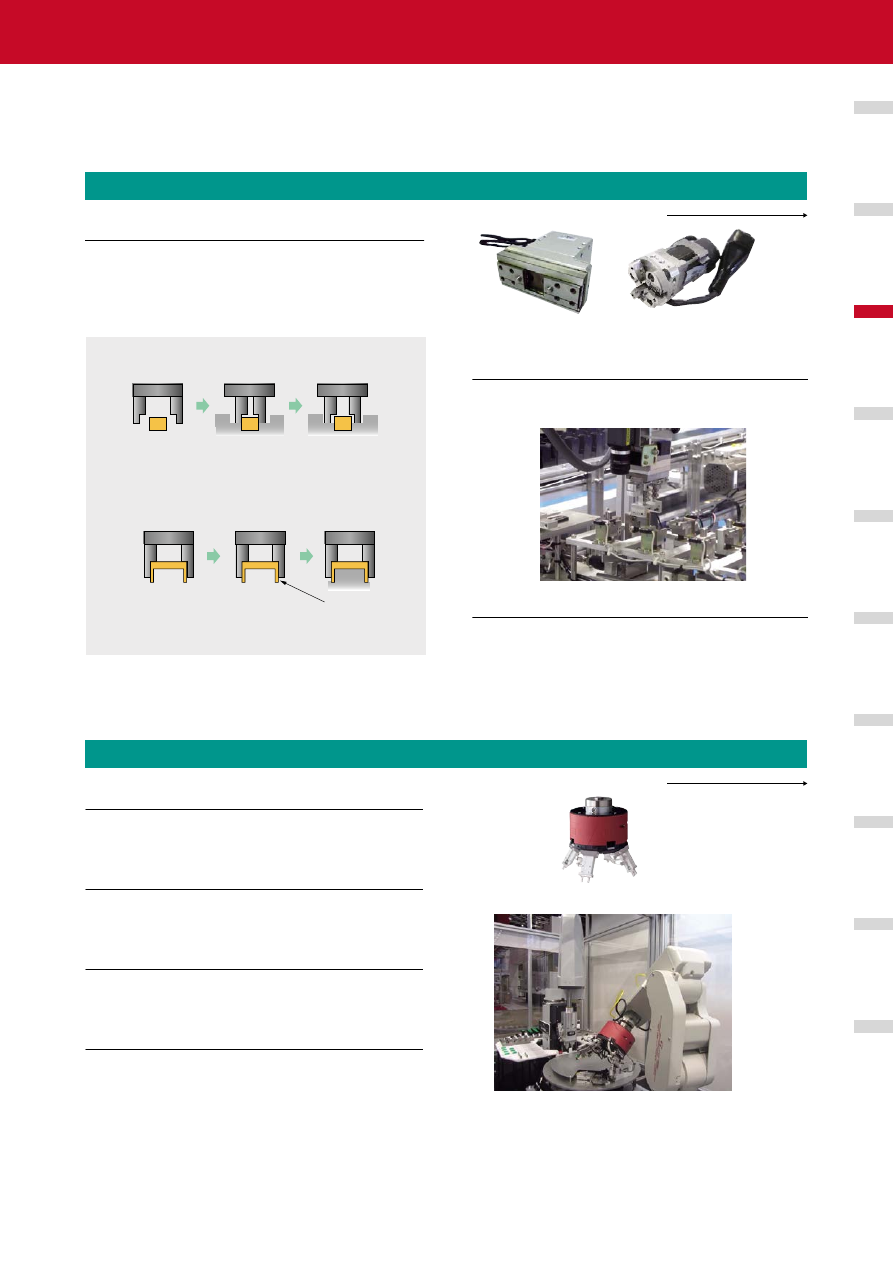
マルチハンド
多機能電動ハンド
異品種に対するハンド交換等の段取り時間の削減や、同時搬送・組付け
等作業効率が向上します。
ダブルソレノイドバルブ4個、センサ入力16点を標準装備し、作業に合わせ
て最大4個までのハンド(チャック)が搭載可能
ハンド用通信ケーブル1本と電磁弁用エア配管1本で接続完了
ティーチングボックスから自由に操作。ハンドの基準座標系もあらかじめ設
定済みのため、ツール設定もオフセット指定するだけの簡単設定
やわらかいワーク、重量物などつかむ対象に応じた把持力・把持速度を設
定することが可能です。複数の大きさの異なるワークを扱う場合でも、動作
位置指定により、最適なストロークを指定することが可能です。ハンドの位
置フィードバックにより、把持の成功/失敗や、ワーク寸法測定による合否
判定等、製品検査への適用が可能です。
●多機能電動ハンド(TAIYO製)
●マルチハンド(IDEC製)
ワーク外形に応じた動作ストローク、把持力をロボットプログラムで簡単に
設定できます。
多品取り対応
エアシリンダでは実現不可能な高機能な動作制御
オールインワン
シンプル配線
簡単操作
簡単制御
簡単操作
ティーチングボックスのハンド専用画面から、自由に操作できます。
開閉ストローク制御による干渉防止
〈電動ハンドのメリット〉
◎多点位置制御(多品種対応、開閉ストローク調整)
樹脂成型品等の変形防止
ワーク把持
組み付け
〈電動ハンドのメリット〉
◎速度制御(ワーク形状維持、衝撃力緩和)
◎把持力制御(ワーク変形防止)
ハンド
ハンド
ハンド
搬送
変形防止
ハンド
ハンド
ハンド
ワーク把持・搬送
組み付け
ハンド開
仕様詳細はP68を参照ください
仕様詳細はP68を参照ください