17
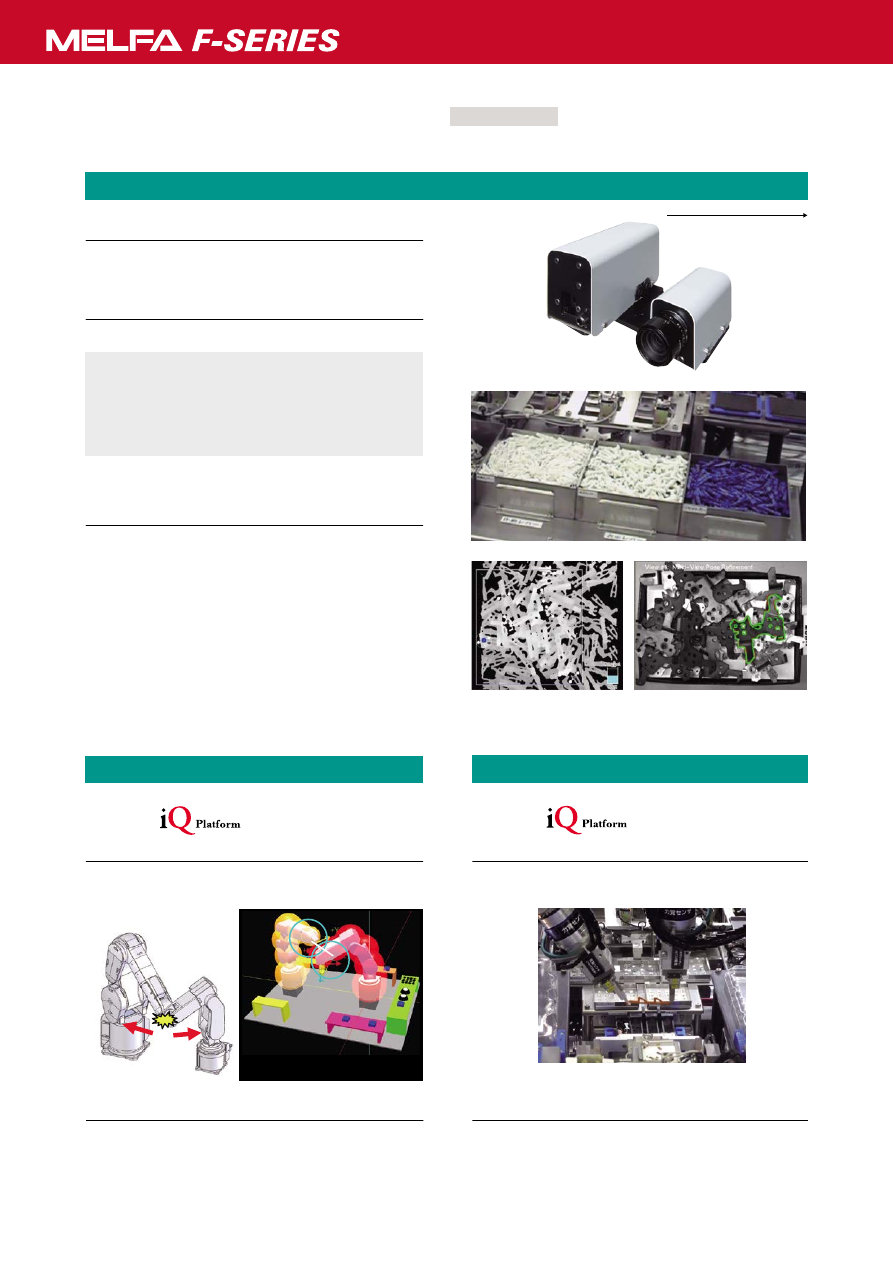
三次元ビジョンセンサ
対象ワークの三次元モデル登録が不要で立上時間を短縮できます。
干渉回避機能
モデルレス、モデルマッチングの各認識手法を用途に合わせて使い分ける
ことが可能です。
専用トレイやパーツフィーダを使わないバラ置き供給の実現で、部品供給
作業を軽減します。
従来の常識を覆し、面倒なワーク形状登録が不要なビンピッキング(バ
ラ積みワークの取り出し)
を実現しました。把持に必要な簡単な情報(ハ
ンドの爪幅、爪寸法、吸着パッドサイズ等)
を入力するだけで、様々な
ワークに対応できるため、立ち上げ時間を短縮できます。
JOG操作時や自動運転時のロボット同士の衝突を事前検知して停止させ
ることにより、予期せぬ干渉を防止することができます。
ティーチング作業ミスやインターロック忘れによる衝突後の復旧工数が低
減できます。
【Qタイプコントローラのみ】
互いの把持位置関係を保ったままでの組付け作業
ビジョンセンサの常識を覆すモデルレス!
※最終的に位置決めする場合には2次元ビジョンなどが必要です。
※2次元ビジョンを併用する場合、2次元ビジョンの調整は必要です。
協調制御
ロボット間CPU接続により、必要なときに個別のロボット同士による協調制
御を行うことが可能です。通常は個別動作のため、操作、運用が容易です。
大型ロボットを使うことなく、小型のロボットを複数台使用して長尺物、重量
物の搬送が可能です。
バラ置き供給の実現
独自技術による高速ビンピッキング
ロボット同士の衝突を自動的に防止
複数の認識手法に対応
立ち上げ作業時の作業負担を軽減
複数アームによる協調制御
協調搬送
【Qタイプコントローラのみ】
より高度なアプリケーションに応えるために
知能化ソリューション
仕様詳細はP66を参照ください
バラ積み部品供給
MELFA-3D Vision
モデルレス認識
モデルマッチング認識
ロボットアームを立体モデルで定義して
干渉チェック