16
製
品
特
長
ラ
イ
ン
ア
ッ
プ
一
覧
機
能
紹
介
ロ
ボ
ッ
ト
本
体
仕
様
コ
ン
ト
ロ
ー
ラ
仕
様
シ
ス
テ
ム
構
成
オ
プ
シ
ョ
ン
仕
様
技
術
情
報
F
A関
連
製
品
サポート
・
ネッ
トワーク
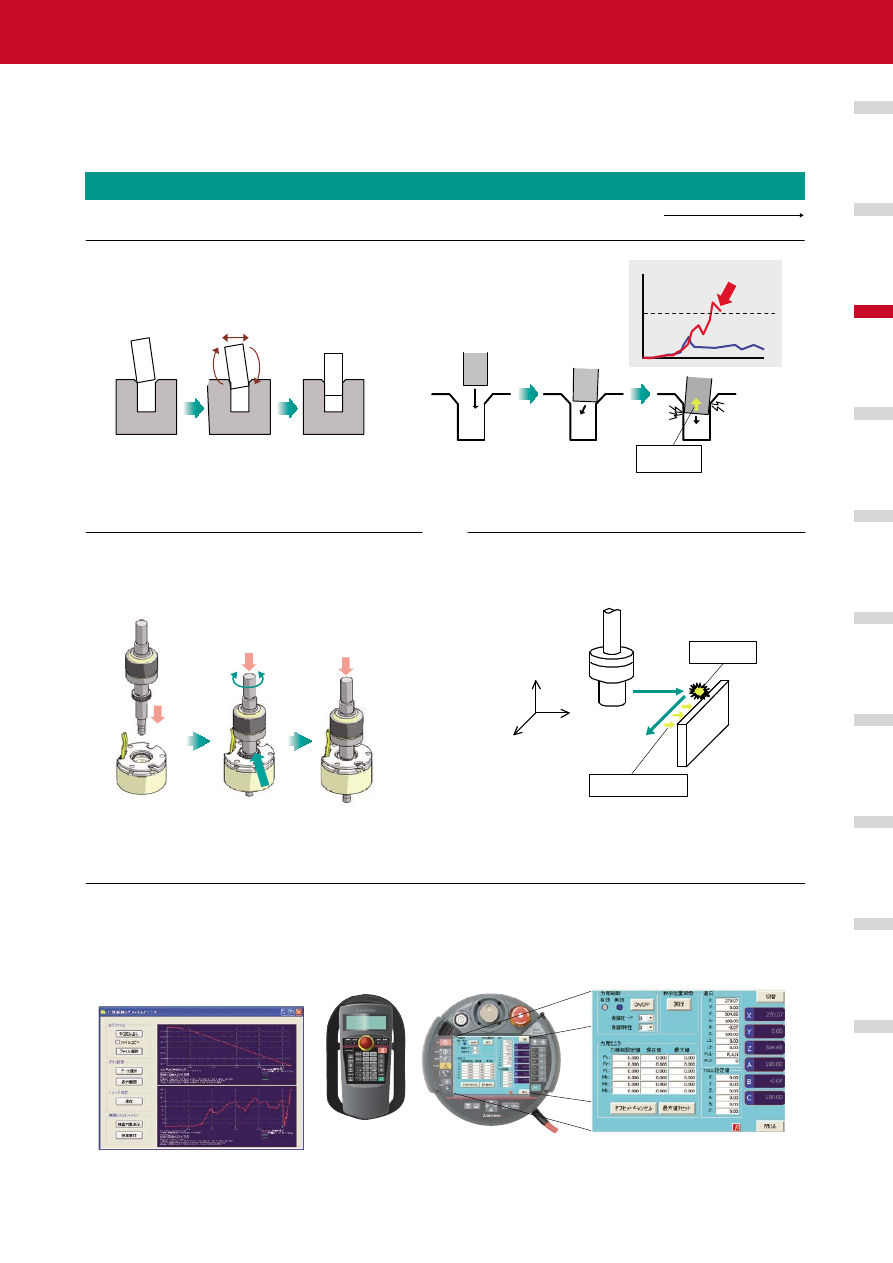
高精度な勘合動作、品質確保、信頼性向上
力覚制御機能
接触
角度修正
位置補正
挿入
10Nでユーザ
エラーを発生
Z方向押し付け力
制御+回転動作
Y方向倣い制御
による挿入作業
位相検知
位相合わせ組付け
動作変更
■力覚ログ-(RT ToolBox2ログビューア)
R56TB/R57TB
象物に一定の力を
加えながら、動作
X
Y
Z
対象物を検知
2Nで押しながら動作
R32TB/R33TB
力
異常停止
正常作業
やわらか制御+エラー検知
ロボットを柔らかく制御し、対象ワークに倣いながら動作させることができます。
挿入時に指定以上の力がかかった場合は、エラーを発生させて動作を中断することができます。
位相合わせなど複雑な組付け作業を実現
力検知による動作変更
接触状態検知により、素早く動作方向や力制御を切替ることができます。
補間動作中の力覚制御特性を変更し、自由度の高い組付け作業が可能
です。
教示作業支援
力覚GUI搭載
●パソコンサポートS/W(RT ToolBox2)や、ティーチングBox(R56TB/R57TB、R32TB/R33TB)に力覚GUI画面を標準搭載し、簡単に力覚センサの操
作が可能です。
●位置データに同期した力データをログデータとして保存できます。
●ログデータをRT ToolBox2を用いグラフ表示が可能です。
●ログデータファイルをFTP経由でPCに転送することができます。
一定の力による作業を実現
押しつけ力制御
任意の方向に一定の力で押付け動作ができます。バリ取り作業やテンショ
ン掛け作業にも適用可能です。
ティーチングボックスの力覚制御専用画面により、
力状態を見ながら教示。最適な位置教示が可能
仕様詳細はP65を参照ください