15
より高度なアプリケーションに応えるために
精度の高いビジョンセンサやロボットで力加減を制御する力覚センサなどを活用することによって、いままで自動化できなかった
難易度の高い作業を自動化します。
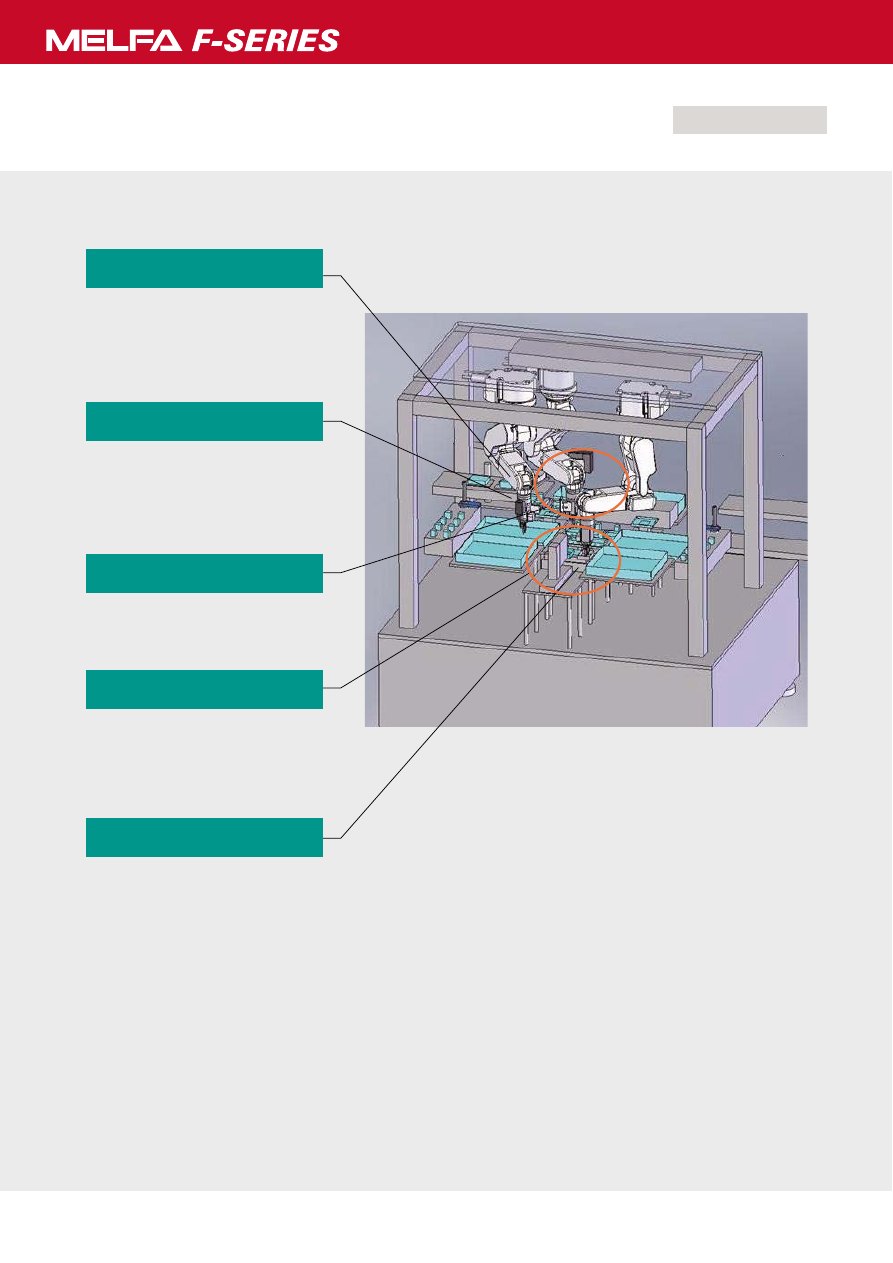
ロボットによるセル生産システムにおける機能活用例
力覚制御
三次元ビジョンセンサ
干渉回避
協調制御
多機能ハンド
●押付け力、挿入時の力状態をチェックし、作
業品質を向上
●はめあいの厳しいワークの組付け
●力情報によるティーチング支援
●パーツフィーダや位置決め治具を使用せず
ワークハンドリング
●バラ置き、重なり状態のワークのキッティン
グ、分別作業
●2台のロボット間でのアームおよびハンドの
干渉チェックを行い、ロボット間の接触防止
●2台のロボットで、協調して長尺物、重量物
を搬送
●固定されていない部品の位置関係を保った
まま搬送組付け
●電動ハンドにより、サイズの異なる多種部品
に対するハンドリングを実現
●段取り替えの削減
●マルチハンドによる同時搬送、タクトタイム
短縮
知能化ソリューション